
 Acoustic Doppler Current Profiler - ADCP
Acoustic Doppler Current Profiler - ADCP
Sensor function
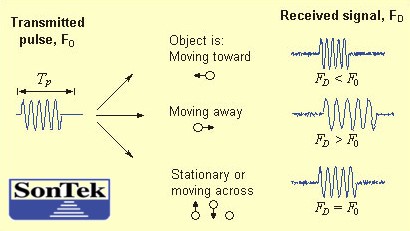
Using the principle of Doppler Shift, an ADCP uses sound waves to measure the speed and direction at which water moves across an entire water column. An ADCP will transmit constant (high) frequency pulses of sound which scatter off of moving particles in the water. Measured frequencies of return signal will vary based on the direction of water flow. These pulses extend to the bottom of the ocean and as such, an ADCP measures current speed and direction at many different depths simultaneously.
 ADCPs use acoustic transducers which emit and receive acoustic pulses from different directions. Trigonometric relations allow for the derivation of current direction; each transducer represents cardinal direction on a coordinate plane (north-south, east-west, and up-down).
ADCPs use acoustic transducers which emit and receive acoustic pulses from different directions. Trigonometric relations allow for the derivation of current direction; each transducer represents cardinal direction on a coordinate plane (north-south, east-west, and up-down).
Usage of data
Offshore energy surveying, coastal and oceanographic studies, position measurements of boats, ROVs and AUVs. Depending on the orientation of the sensor, ADCPs measure a vertical profile of current speed and direction, vessel speed and direction, positional data (i.e. distance above the sea bed), as well as show the distribution of suspended material.
Data processing / data quality control
In order to determine the motion of ocean currents relative to the earth, the ADCP communicates with many other sensors on board ships. Sensors such as vessel GPS, heading, pitch and roll all communicate with the ADCP electronics through the vessel main computer to combine measurements of ship velocity and apparent water velocity. The end product is a 2-D representation of true current velocity with respect to depth.
Reference: TELEDYNE RD INSTRUMENTS (http://www.rdinstruments.com/)